
ニュース ロボットの繰り返し位置決め精度は?. トピックに関する記事 – ロボットの位置繰返し精度は?

各メーカーのロボットは「位置繰り返し精度」をチェック
「位置繰返し精度」とは、同じ対象物の位置決めを繰り返し行い、そのばらつき結果を計測したものです。 産業用ロボットのJIS規格でも定義されており、協働ロボットの動作精度を測る際にも重要なポイントにもなっています。現在、中国内外で開発されている産業用ロボットの繰り返し位置決め精度は比較的高く、0.01mmに達することができる[2-3]。 だがロボットは、機械加工誤差や組み立て誤差、部品の摩耗、末端負荷の変化、温度の影響の共同の作用を受けることから、絶対位置決め精度は比較的低い[4-5]。同じ位置に同じ方向から繰り返し位置決めをおこなったときに、どれだけの誤差が生じるかを表した値です。 精度は一定温度、一定負荷での値です。

スカラロボットの位置決め精度は?スカラロボットの位置決め精度は±0.01mm程度あります。 この精度を人の手作業で出すことはかなり困難です。
位置決め精度と繰り返し精度の違いは何ですか?
実際に違いを見てみましょう。 「位置決め精度」の場合、移動量の全域にわたって一定間隔で位置決めを行ない、各位置でのズレ量を測定します。 「繰返し位置決め精度」の場合、同一の目標位置に対して繰返し位置決めを行ない、毎回のズレ量を測定します。「絶対精度」とは、ロボットの移動量がプログラムと現実で一致する精度です。 この精度が優れていないと、Xがプラス100mmのプログラムで移動させると、現実ではXが103mmつまり3mm余分に移動してしまいます。 それだけでなく、たわみ等でZまでマイナス2mm移動してしまいます。
繰り返し位置決め精度と位置決め精度の違いは何ですか?
「位置決め精度」の場合、移動量の全域にわたって一定間隔で位置決めを行ない、各位置でのズレ量を測定します。 「繰返し位置決め精度」の場合、同一の目標位置に対して繰返し位置決めを行ない、毎回のズレ量を測定します。

1. 繰り返し位置決め精度
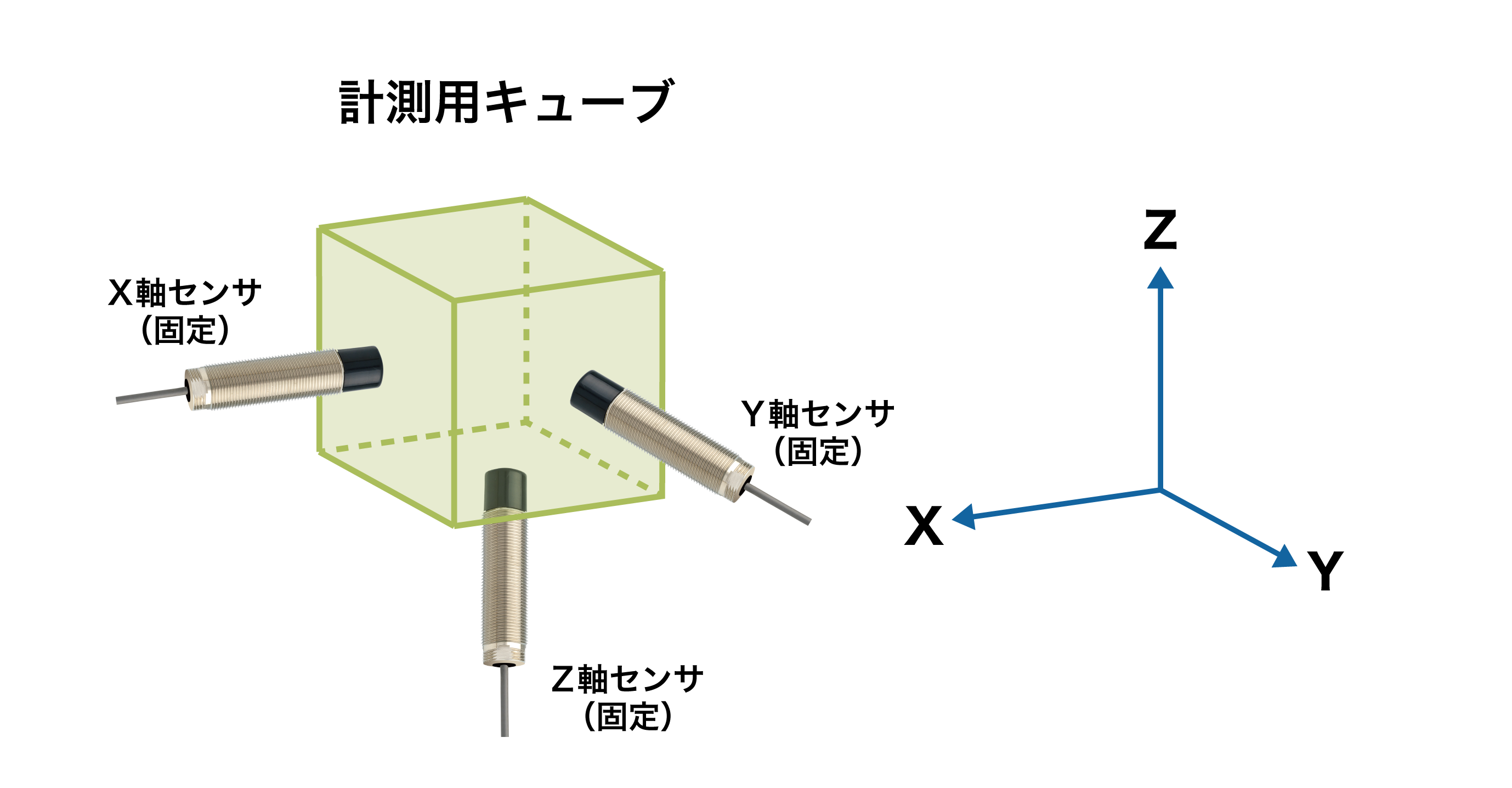
任意の一点に同じ方向からの位置決めを7回繰り返して停止位置を測定し、読みの最大差の1/2を求めます。 この測定を移動距離の中央および、ほぼ両端のそれぞれの位置で行い、求めた値のうちの最大のものを測定値とし、その値に±の符号を付けて表したものです。
スカラロボットの繰り返し精度は?
スカラロボット|4軸水平多関節ロボット HMシリーズ
・位置繰返し精度は±0.02mm~と、精密、微細作業もスピーディーに対応。 ・抜群の高速・高精度作業で、生産性向上に威力を発揮。水平多関節ロボット(スカラロボット)のデメリット
水平方向での運動に特化した水平多関節ロボットは、垂直的な動作、あるいは、三次元的な動作を苦手としています。 垂直多関節ロボットと比較すると、凡庸性に劣る点は、水平多関節ロボットの大きなデメリットの一つと言えるでしょう。位置決め精度とは、工作機械の試験・検査などにおける基本事項関連の用語の一つで、直線運動における位置決めや回転運動における位置決めなどの、設定した目標位置に対して実際に停止した位置の正確さの意味です。

繰り返し位置決め精度は、同じ方向から同じ速度で移動してきて、繰り返し同じ位置にばらつきなく静止できるかの性能です。 絶対位置決め精度は、絶対座標に対する位置決めの性能で、3次元測定器などに用いられるロボットに必要とされる性能です。
ロボットに賛成する理由は何ですか?ロボットは、休みなしで稼働することが可能なため、夜間や休日も生産することができるので、生産性が向上する。 人手に代わりロボットが動いてくれるため、残業代が大幅に抑えられて人件費を削減できる。 また、人材募集の手間やコストも削減できる。 これにより、コスト削減と価格競争力の強化が図れる。
精度の計算方法は?一般的に精度と呼ばれるもので、「正解数/データ数」で計算できます。
スカラロボットの欠点は何ですか?
水平多関節ロボット(スカラロボット)のデメリット
水平方向での運動に特化した水平多関節ロボットは、垂直的な動作、あるいは、三次元的な動作を苦手としています。 垂直多関節ロボットと比較すると、凡庸性に劣る点は、水平多関節ロボットの大きなデメリットの一つと言えるでしょう。
(2)スカラロボットのデメリット
- ①高精度かつ高速な動作が求められる作業は不向き
- ②使用用途の自由度が低い
“弱いロボット”を研究する岡田美智男教授
このロボットの開発に携わったのが、豊橋技術科学大学の岡田美智男教授(63)。 長年研究しているのが、周りの人の手助けが必要な“弱いロボット”です。 これまで研究室の学生とともに多くの“弱いロボット”を作ってきた岡田教授。「全方位スカラロボットYK500TW」